Maze solving autonomous mobile robot "Micromouse" (2022)
Description
This was my final project for the course “Control Engineering”, which consists of developing an autonomous mobile Ackerman robot, capable of lane tracking by just using a camera as feedback for a control system.
My contribution to the project was:
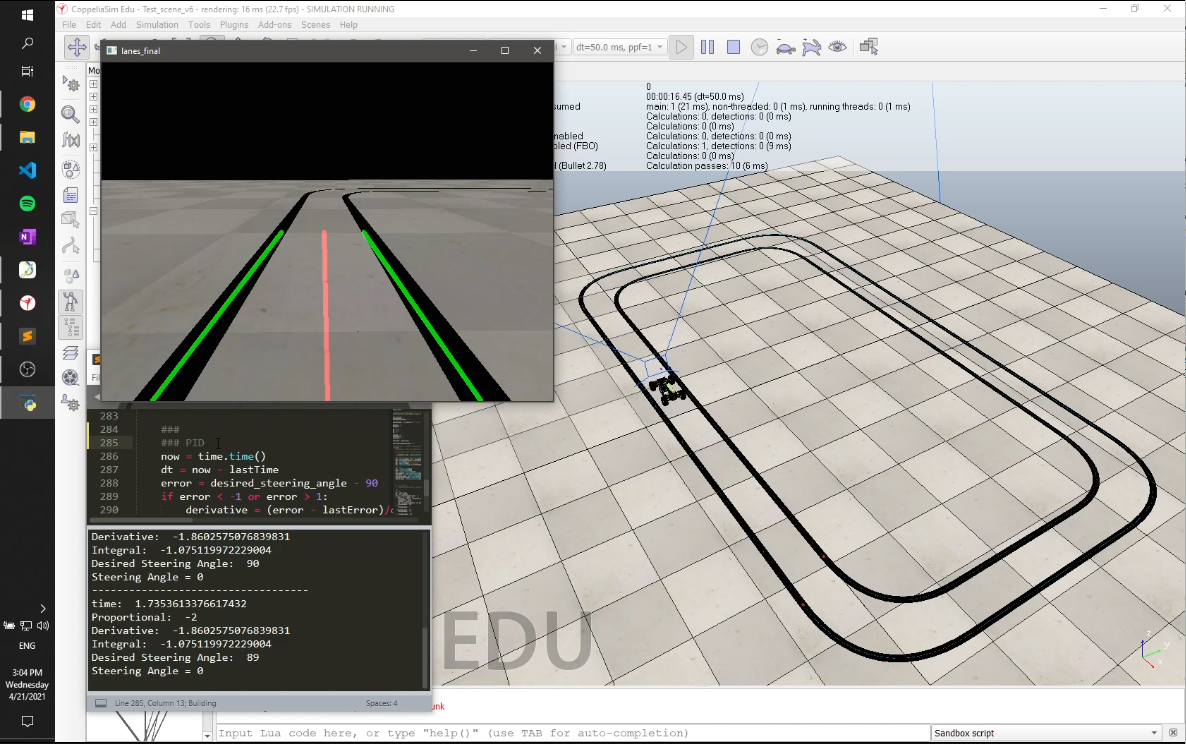
- Developed the simulation environment and the robot in the simulation software (V-Rep)
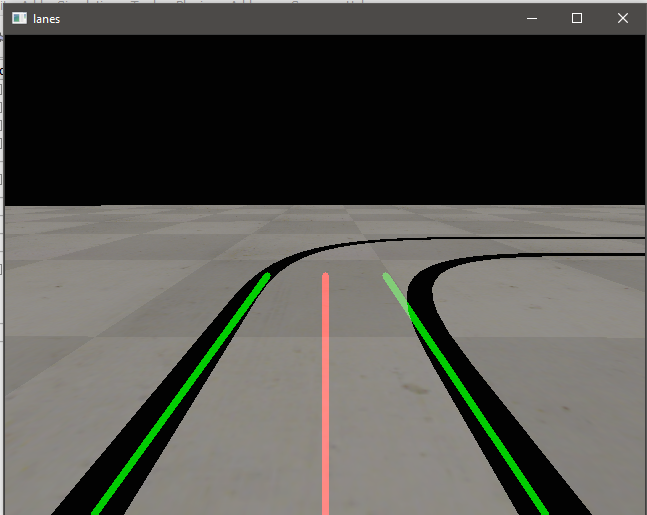
- Developed image processing algorithms and techniques to gather the necessary information to track the lanes using OpenCV on Python
- Developed the PID control system of the robot to keep the robot on the track in straight lines and curves