Latest Projects
Set up, different implementations, CAD designs, several guides for future work on research with Turtlebot 2 with a Jetson TX2, ROS Melodic, RGB-D Camera & LiDAR (2020 - Present)
This is a continuing project and my current work as a research assistant at CETYS University. It consists of working and doing research in different fields with the Turtlebot 2 with a Jetson TX2 ROS Melodic.
Maze solving autonomous mobile robot "Micromouse" (2022)
This was my final project for the course “Operating systems” which consists of developing from scratch an autonomous mobile robot capable of solving mazes by its own
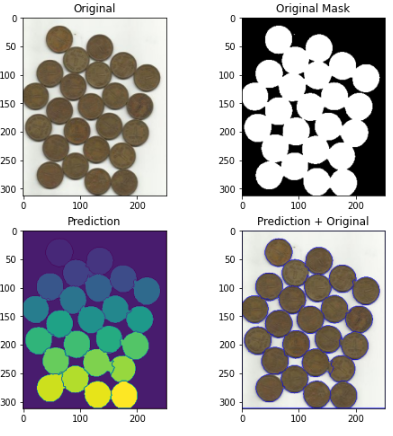
Various different Computer vision & Image processing assignments & projects (2021-2022)
These assignments and projects are from three specialization courses from my University, and the content was about computer vision and image processing.
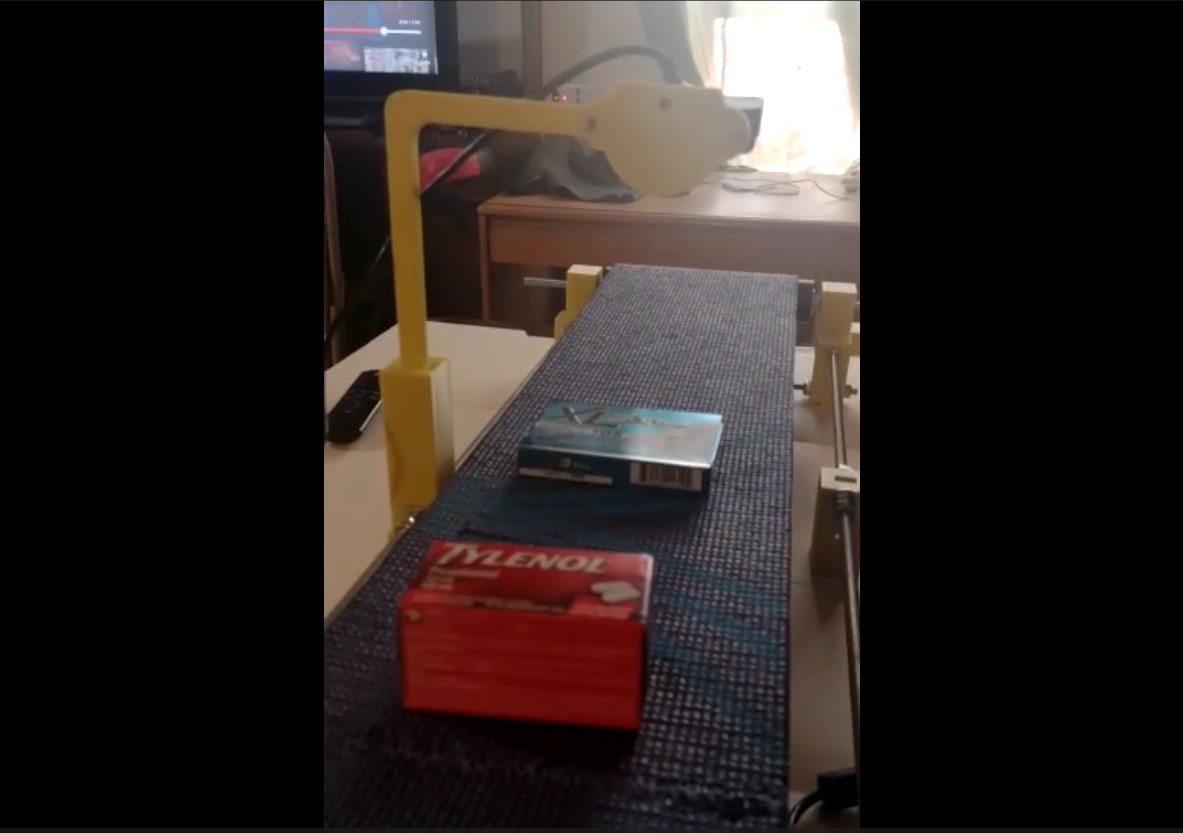
Visual detector conveyor system with CNN to keep track of a medicine order (2021)
This project consists of developing a conveyor system from scratch and using a camera with a CNN (VGG-16), to classify different kinds of medicines, and therefore keep the track of a hypothetical medicine order in a big pharmacy.
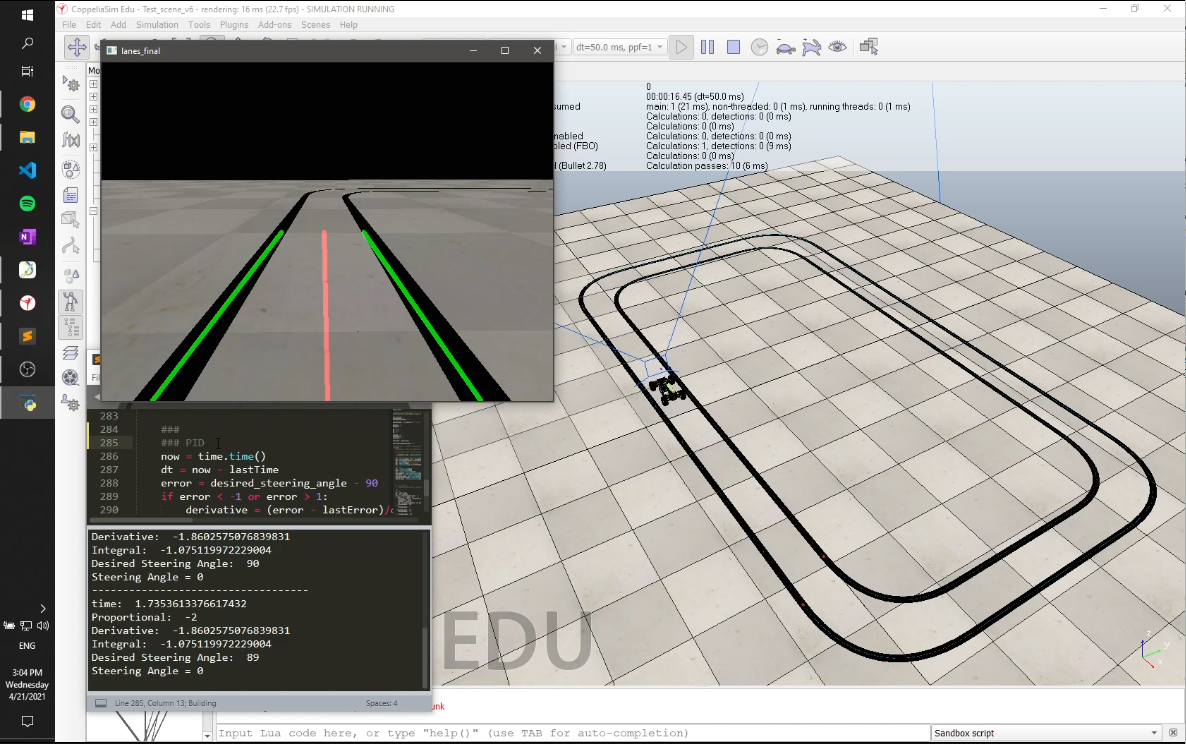
Autonomous lane tracking Ackerman robot (2021)
This was my final project for the course “Control Engineering”, which consists of developing an autonomous mobile Ackerman robot, capable of lane tracking by just using a camera as feedback for a control system.
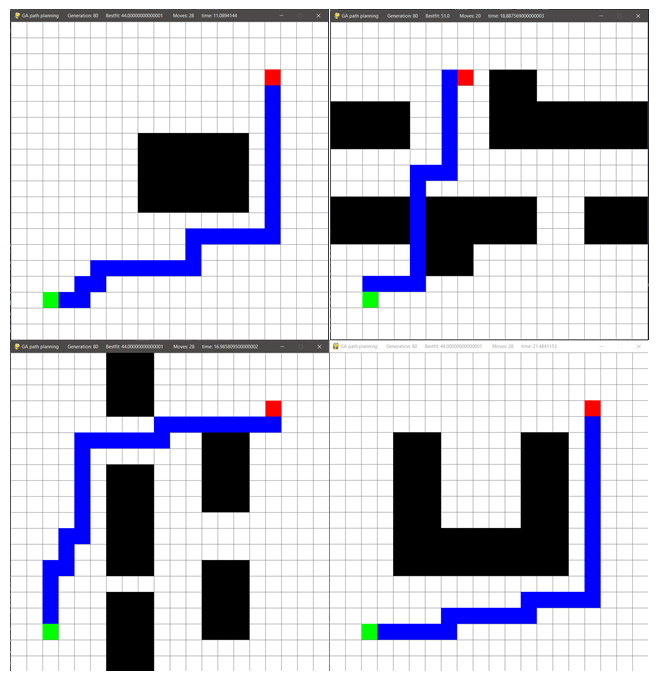
Genetic Algorithm applied to a path-planning problem (2020)
This project was part of my own research for my course “Research Methodology”, which consists of applying the concept of a genetic algorithm to the path-planning research field.

Applying different path planning algorithms to Turtelbot 2 using the ROS framework (2020)
This was my final project for the course “Algorithm Design”, which consists of using the ROS (Melodic) framework and Gazebo to develop a path-tracking Turtlebot 2 in a simulated already-known environment, the trajectory was calculated using two main algorithms Dijkstra and A*.
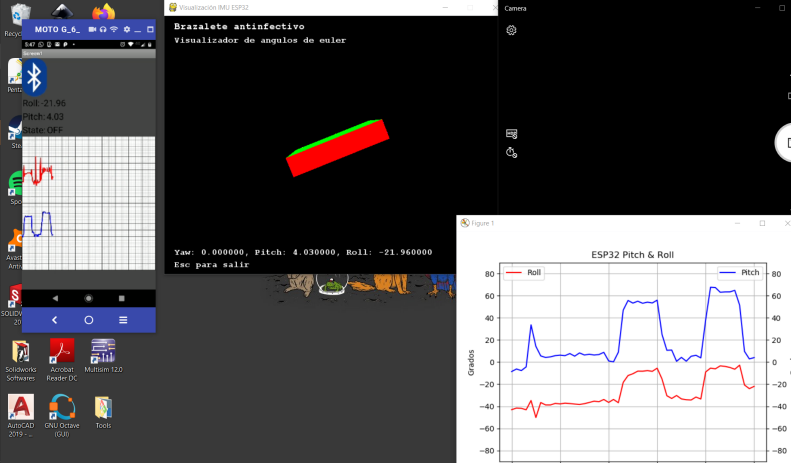
Antiinfective bracelet (2020)
This was my final project for the course “Microcontrollers and Embedded Systems” . This project consisted of developing a solution for a specific problem presented during the COVID-19 Season.
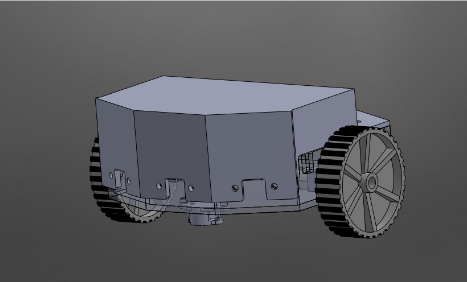
Differential drive robot with a Jetson nano, RGB-D camera "Kinect", ROS Melodic, for navigation purposes (2019)
This project consisted of creating from scratch a differential drive autonomous mobile robot with a Jetson Nano, RGB-D Camera (Kinect), Camera, and working with ROS Melodic for navigation in indoor environments.
Differential drive robot with a Jetson TK1, Ultrasonic sensors, ROS Jade, for navigation purposes (2019)
The project consisted of developing an autonomous mobile robotic system working with ROS Jade on a Jetson TK1 for future research purposes.
Publications
Luis Rodolfo Macias, Kenia Picos, and Ulises Orozco-Rosas "Driving assistance algorithm for self-driving cars based on semantic segmentation", Proc. SPIE 12225, Optics and Photonics for Information Processing XVI, 1222505 (3 October 2022); https://doi.org/10.1117/12.2634076
Luis Rodolfo Macias, Ulises Orozco-Rosas, and Kenia Picos "Simultaneous localization and mapping using an RGB-D camera for autonomous mobile robot navigation", Proc. SPIE 11841, Optics and Photonics for Information Processing XV, 118410M (1 August 2021); https://doi.org/10.1117/12.2594033