Maze solving autonomous mobile robot "Micromouse" (2022)
Description
This project was part of my own research for my course “Research Methodology”, which consists of applying the concept of a genetic algorithm to the path-planning research field.
My contribution to the project was:
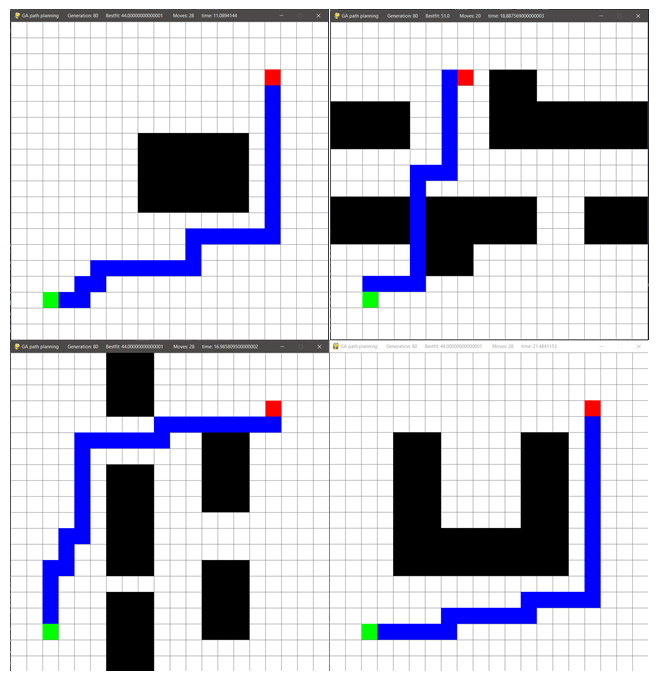
Developed the simulation system and the genetic algorithm, this prototype was developed using python. The genetic algorithm was developed in a way that each part of the path-planning problem was represented as a specific part of the genetic algorithm according to the theory. The gene was a specific kind of movement (Moore & Von Neuman were used), the chromosome was the trajectory(this was a challenge mainly because the trajectory needs to be dynamic in order to achieve an optimal path), the cost function was also a challenge and was mainly done by using different approaches and different weights to each characteristic of the chromosomes. The length of the trajectory, the total euclidean distance of the entire trajectory, and the distance between the goal and the end of the trajectory.