Applying different path planning algorithms to Turtelbot 2 using the ROS framework (2020)

Description
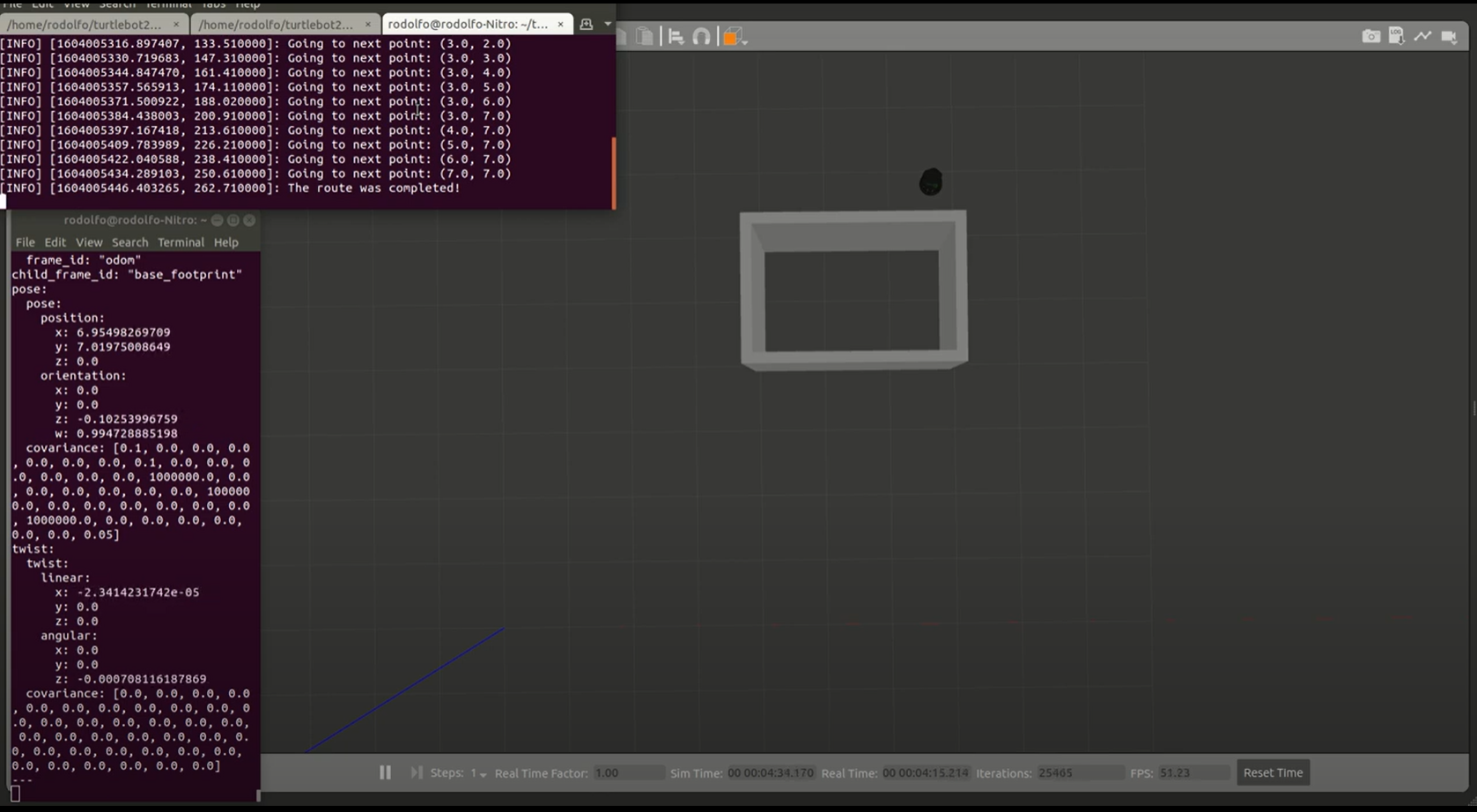
This was my final project for the course “Algorithm Design”, which consists of using the ROS (Melodic) framework and Gazebo to develop a path-tracking Turtlebot 2 in a simulated already-known environment, the trajectory was calculated using two main algorithms Dijkstra and A*.
My contribution to the project was:
- Developed the path planning algorithms (Dijkstra & A*) for the Gazebo environment
- Developed the PID controller for the Turtlebot 2 to get from point A to point B by using its own odometry information as feedback and computing the desired linear velocity and angular velocity